SELECTED PROJECTS (See my CV for a complete list)
AFRL: Data Fusion of GNSS with LEO Satellites as Alternate-PNT Systems Including Anomaly Detection
The objective of this proposed project is a novel software-defined, resilient, network-based Position, Navigation, and Timing (PNT) system that has the potential to provide robust PNT for single-weapon and network-enabled weapon systems of interest to AFRL/RWWN. This proposed technology efficiently utilizes network signals from Low Earth Orbit (LEO) satellites (LEO PNT), Time Difference Of Arrival (TDOA), and Kalman filtering methods to provide accurate and precise PNT. Note that there is no need to collaborate with, or communicate via, the LEO satellites themselves. Rather, the proposed technology uses the LEO Satellites as RF Signals Of Opportunity (SOOP). Reference stations (stationary or mobile) at known locations measure TOA data of the LEO satellites that they can opportunistically receive. These TOA data are securely streamed to Command-and-Control (C&C) servers located in-theatre or secured in the cloud. The C&C servers compute position, velocity, altitude (PVA) for all of the LEO satellites that are in-theatre and stream the resulting LEO PVA and TOA to the in-theatre assets e.g., Aircraft, Drones, Munitions, and Mounted or Dismounted warfighters. Given the PVA and TOA, this technology enables assets to navigate to waypoints and targets to sub-meter accuracy using alt-PNT as a robust alternative to the easily spoofable and jammable Global Navigation Satellite Systems (GNSS). Proposed alt-PNT algorithms are modular to facilitate integration with existing RF network interfaces or use advanced low-probability of detection/interference (LPOD/I) Ultra-Wide-Band (UWB) network transceivers, and very importantly, their implementation is intended on COTS Software Defined Radios (SDR). All PVA and TOA data are recorded at the C&C servers for forensic analysis and algorithm testing and improvement.

Funded by AFRL under Grant no. FA8651-22-1-0017. PI: R. G. Sanfelice (UCSC)
AFRL: Multi-Agent Hybrid Reinforcement Learning for Safety
The objective of this work is to generate new fundamental science for hybrid dynamical systems that enables systematic design of algorithms using reinforcement learning (RL) tech- niques that are hybrid. Hybrid systems are dynamical systems with intertwined continuous and discrete behavior. Hybrid controllers are algorithms that involve logic variables, timers, memory states, along with the associated decision-making logic. The combination of such mixed behavior, both in the system to control and in the algorithms, is embodied in key future engineering systems. The future autonomous systems will have variables that change continuously according to physics laws, exhibit jumps due to controlled switches, replanning of maneuvers, on-the-fly redesign, and failures, while the control algorithms require logic to adapt to such abrupt changes. Hybrid behavior also emerges in such engineering systems due to their complexity. In fact, communication events, abrupt changes in connectivity, and the cyber-physical interaction between vehicles, humans, robots, their environment, and com- munication networks lead to impulsive behavior that interacts with physics and computing. In this project, we propose to develop novel hybrid reinforcement learning control algorithms that can be validated in experimental data-driven testbeds. The proposed combination of hybrid control and learning informed by real-time data exploits – in a holistic manner – key robust stabilization capabilities of hybrid feedback control and learning capabilities of RL for autonomous systems of interest to AFRL that are part of the broad mission of the DoD.
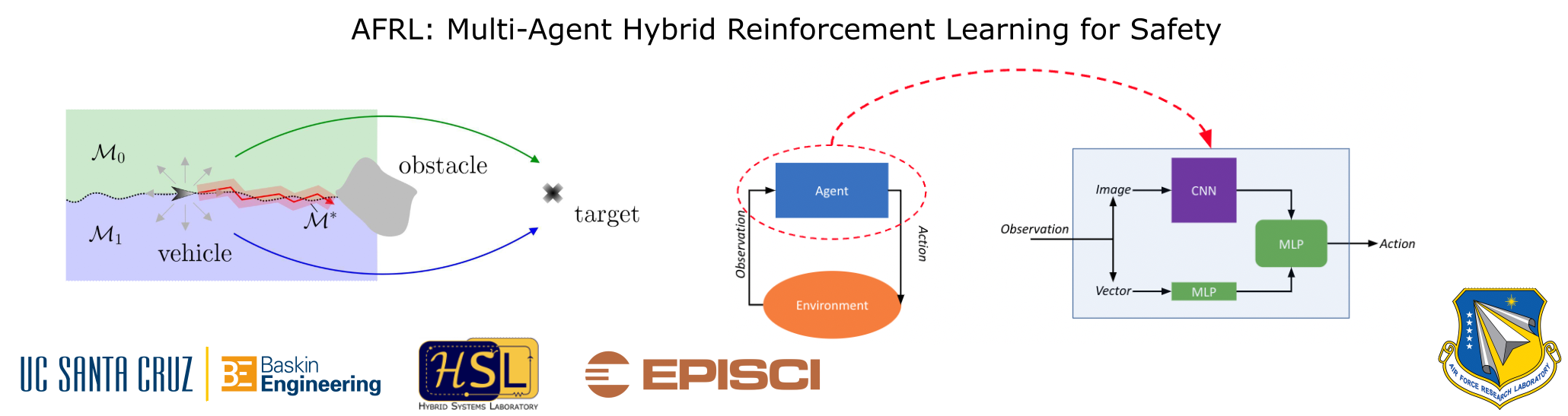
Funded by AFRL under Grant no. FA8651-22-S-0001. PI: R. G. Sanfelice (UCSC), Co-PI: Prashant Ganesh (EpiSci)
ARO: Learning Algorithms for Hybrid Dynamical Systems using Experimental Data
The objective of this work is to generate new fundamental science for hybrid dynamical systems that enables systematic design of algorithms for learning the parameters, dynamics, and constraints of such complex systems, using experimental data. Hybrid systems are dynamical systems with intertwined continuous and discrete behavior. Hybrid controllers are algorithms that involve logic variables, timers, memory states, along with the associated decision-making logic. The combination of such mixed behavior, both in the system to control and in the algorithms, is embodied in key future engineering systems. The future autonomous systems will have variables that change continuously according to physics laws, exhibit jumps due to controlled switches, replanning of maneuvers, on-the-fly redesign, and failures, while the control algorithms require logic to adapt to such abrupt changes. Hybrid behavior also emerges in such engineering systems due to their complexity. In fact, communication events, abrupt changes in connectivity, and the cyber-physical interaction between vehicles, humans, robots, their environment, and communication networks lead to impulsive behavior that interacts with physics and computing. The intellectual impact of the proposed research plan stems from a novel use of hybrid control theory, one that leads to experimental data-driven learning algorithms for hybrid systems that are not only robust but also optimal. The proposed combination of hybrid control and optimization in- formed by real-time data exploits–in a holistic manner–key robust stabilization capabilities of hybrid feedback control and optimality guarantees of receding horizon control for com- plex autonomous systems of interest to AFOSR that are part of the broad mission of the DoD.
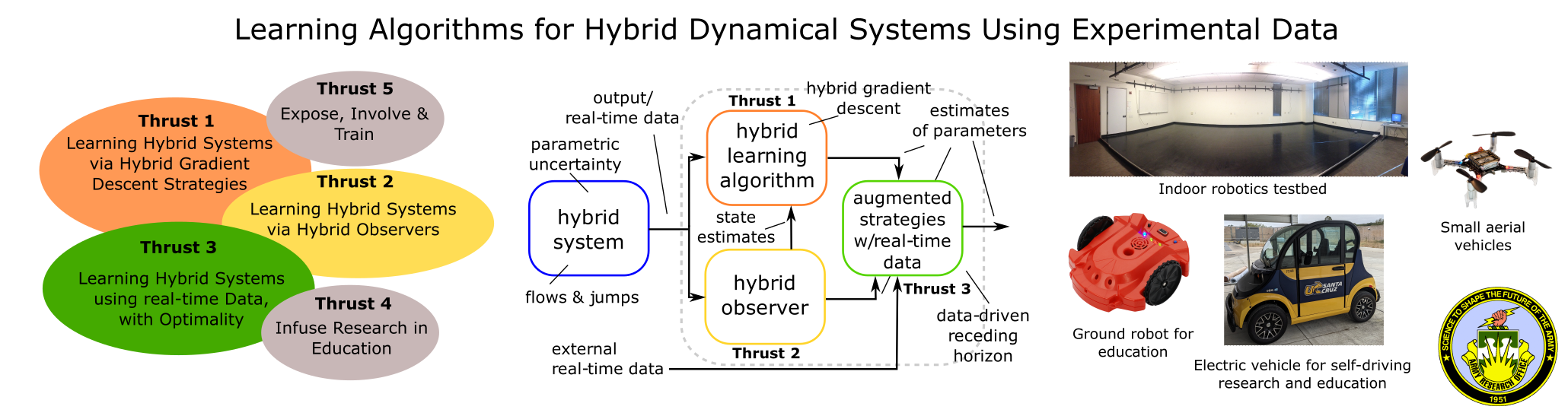
Funded by AFOSR under Grant no. W911NF-23-1-0158. PI: R. G. Sanfelice (UCSC)
AFOSR DURIP: A Test Bed for Verification and Validation of Autonomous Systems with Hybrid Dynamics under Uncertainty
In conventional design processes, the design of the plant, the controller, the prototype as well as the certification of validity are products of consecutive phases of development utilizing distinct simulation, fabrication, and synthesis tools. Each phase produces an “optimal” solution, which is typically not jointly optimal for all phases. Phases need to be restarted from scratch if a new edge case or catastrophic failure is discovered at a later stage, and the interaction between failures, fabrication tolerances, and model inaccuracy is murky at best. To overcome these issues, and building from our effort as part of a current AFOSR grant, we propose to build a test bed implementing a coherent and provably rational methodology for automated design optimization, modeling, test and evaluation, and validation of autonomous systems with guaranteed levels of risk and robustness to uncertainty. The test bed will permit prototyping, experimentation, and redesign of autonomous systems and their components in an unified system. No such test bed is known yet to exist.
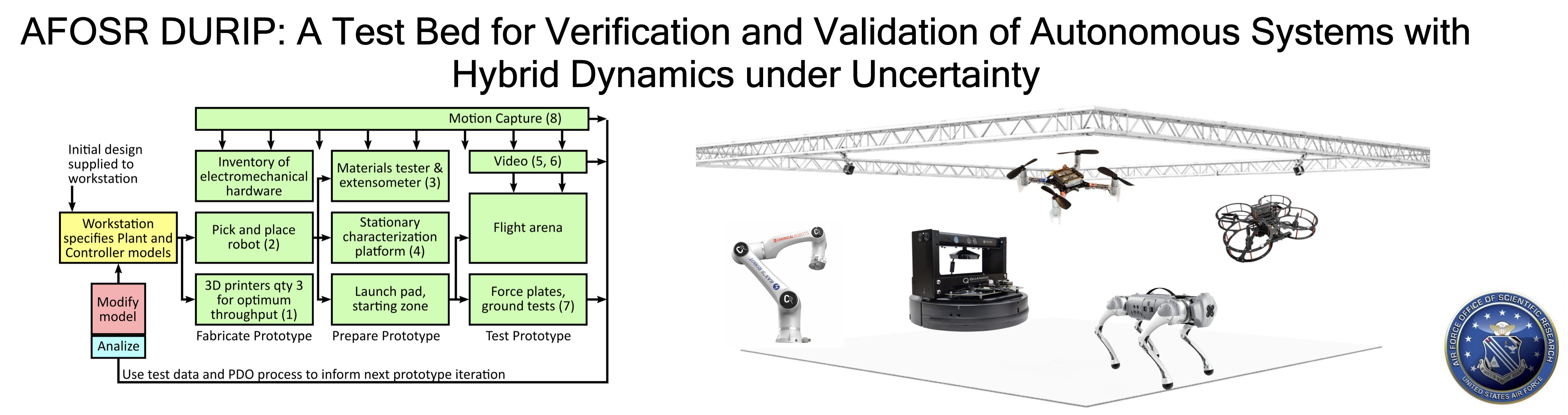
Funded by AFOSR under Grant no. FA9550-22-1-0159. Lead PI: R. G. Sanfelice (UCSC), Co-PIs: D. Venturi (UCSC), M. Wehner (U. Wisconsin)
AFOSR SURI: Digital Twin Enabled Autonomous Control for On-Orbit Spacecraft Servicing
This multidisciplinary program of basic and applied research addresses the challenges of autonomous on-orbit space operations. A novel program of mathematical, computational and engineering research addresses foundational challenges in 1) digital twin technology, 2) feedback control algorithms and 3) human-machine-aware supervisory schemes, all in the context of space systems. A campaign of experimental validation and demonstration in multiple testbeds serves to integrate the research advances; validate, robustify and harden the algorithms; and enable transition of research products into DoD applications. Key novel research ideas include: 1) a probabilistic graphical model foundation for digital twins that automates model calibration and updating, makes data-model integration scalable across many assets and quantifies uncertainty; 2) new feedback control algorithms that leverage model predictive control to achieve control for on-orbit space operations under stringent constraints, and handle uncertainty by accounting for hybrid and set-valued dynamics; 3) new human-machine-aware supervisory schemes targeting uncertain and contested operating environments, synthesized as hybrid control schemes that coordinate control algorithms across different phases of the mission, address recovery from unexpected conditions, and incorporate the role of potential human intervention. Experimental demonstration in testbeds covers mission-specific features in three case studies: on-orbit assembly, decommissioning and towing, and on-orbit refueling. Experiments will be conducted at ERAU, UCSC, NPS, and AFRL/RV, specifically, in the multiple testbeds at the ROC lab, the BONSAI lab, the SPACER lab, and the LINCS lab. The experimental phase is a stepping stone for the development of a flight demonstration in collaboration with AFRL/RV and industry partners. The effort involves industry partners with unique expertise in space operations and the case studies driving the project.
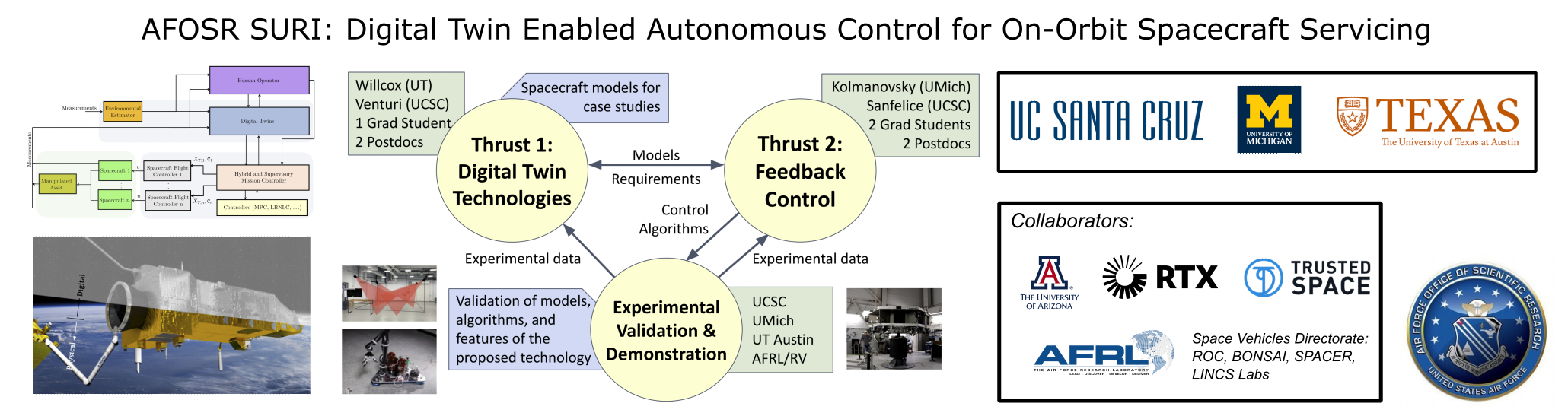
Funded by AFOSR under Grant no. FA9550-23-1-0678. Lead PI: R. G. Sanfelice (UCSC), Co-PIs: I. Kolmanovsky (U. Michigan), K. Willcox (U. Texas at Austin), D. Venturi (UCSC)
Collaborative Research: CPS: Frontier: Computation-Aware Algorithmic Design for Cyber-Physical Systems under Uncertainty
This project explores a new vision of cyber-physical systems (CPSs) in which computing power and control methods are jointly considered. The approach is carried out through exploration of new theories for the modeling, analysis, and design of CPSs that operate under computational constraints. The tight coupling between computation, communication, and control pervades the design and application of CPSs. Due to the complexity of such systems, advanced design procedures that cope with the variability and uncertainty introduced by computing resources are mandatory, though the design choices are across many disciplines, which may result in over-design of a system. The project will have significant impact through the reduction in design and development time for complex cyber physical systems including ground, air, and maritime vehicles. The proposed innovative research plan will advance the knowledge on modeling, analysis, and design of high-performance CPSs operating under computational constraints. By combining key expertise from hardware architecture, real-time systems, nonlinear control, hybrid systems, and optimization algorithms, the developed CPSs will execute algorithms that adapt to the platforms they operate in and to the environment they are deployed on. Additionally, the new platforms to emerge from this project may adapt to the algorithms, through reallocation of resources and self-adaptation/augmentation at runtime, by learning the main features of the platform (e.g., execution time, memory footprint, and power consumption) and of the physics (e.g., dynamics, actuation, sensing). This project will also generate tools to automatically design, synthesize, and implement feedback control algorithms that are compatible with both the physics and the computing platforms in the CPSs. Tools will be validated experimentally in intelligent transportation applications, including real-world ground, aerial, and marine autonomous vehicles, both in-house and in collaboration with our academic and industrial partners. The broader impacts of this project stem from the potential to enable a new generation of transportation systems that improve the reliability and security of autonomous systems. The research in this project significantly addresses the growing carbon footprint challenge through efficiencies in computational CPS infrastructure, optimization of routes, and by increasing the utilization of autonomous systems. Industry partners may deploy enhanced safety and performance innovations on legacy vehicles, diversify hardware applications, and expand future technologies. Additional efforts in mentoring and undergraduate research are focused on Broadening Participation in Computing, with the goal to empower a new generation of researchers who are passionate to have impact on a societal scale.

Funded by NSF under Grant no. 2111688. Lead PI: R. G. Sanfelice (UCSC), Co-PIs: M. Arcak (UC Berkeley), L. Thi Xuan Phan (Penn), J. Sprinkle (Vanderbilt), M. Zamani (CU Boulder), A. Halder (UCSC), H. Litz (UCSC)
AFOSR: Verification and Validation of Autonomous Systems with Hybrid Dynamics under Uncertainty
In conventional design processes, the design of the plant, the controller, the prototype as well as the certification of validity are products of consecutive phases of development utilizing distinct simulation, fabrication, and synthesis tools. Each phase produces an “optimal” solution, which is typically not jointly optimal for all phases. Phases need to be restarted from scratch if a new edge case or catastrophic failure is discovered at a later stage, and the interaction between failures, fabrication tolerances, and model inaccuracy is murky at best. Instead, we propose to combine rapid prototyping, hybrid systems techniques for modeling and control, formal verification, and quantified uncertainty and risk models for systematic autonomous system development. New advanced systems have raced ahead of our ability to analyze them, while advanced manufacturing technologies allow us to quickly and inexpensively build them. The paradigm we propose rapidly prototypes the design, validates its fabrication, and quantifies both its performance and its failure risk by conducting physical tests of the prototypes. This allows the new paradigm to rationally improve this combined representation without being subject to reality-gaps in simulation, and without requiring catastrophic restarts when new edge cases and failure modes are discovered.
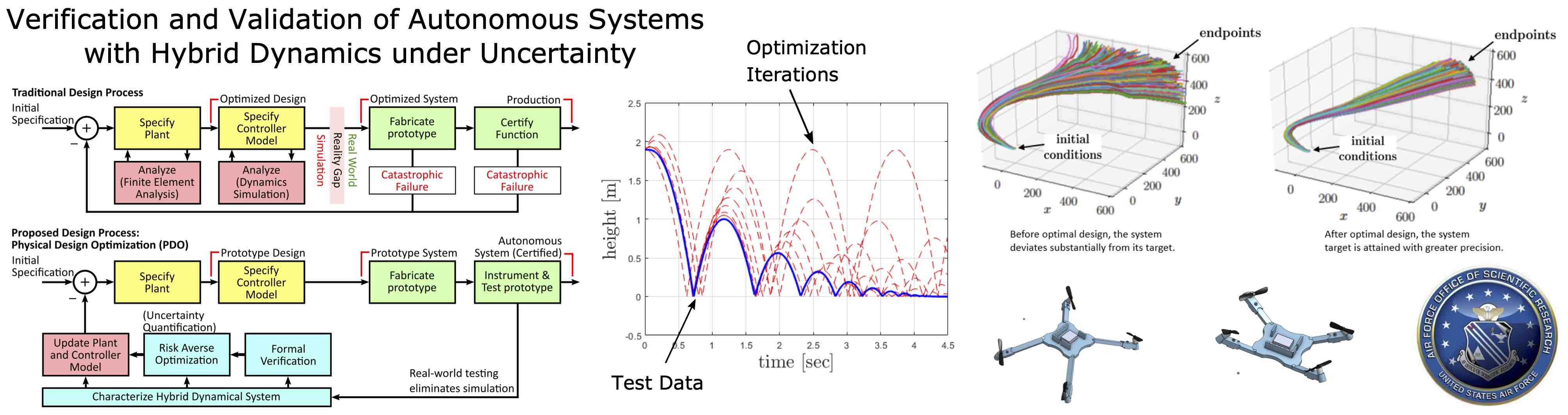
Funded by AFOSR under Grant no. FA9550-20-1-0238. Lead PI: R. G. Sanfelice (UCSC), Co-PIs: M. Wehner & D. Venturi (UC Santa Cruz), and S. Revzen (UMich).
NSF: Collaborative Research: CPS: Medium: Constraint Aware Planning and Control for Cyber-Physical Systems
The objective of this work is to generate new fundamental science for computer controlled complex physical systems, a broad class of cyber-physical systems (CPS), and demonstrate this science in aerial vehicles and walking robots. The new science enables autonomous planning and control in the presence of failures and abrupt changes in system variables. A framework for the design of algorithms that exploit awareness of the physical and design constraints to autonomously self-adapt their motion plan and control actions will be generated. The approach exploits elements from geometry, adaptive control, and hybrid control to advance the knowledge on modeling, planning, and design of CPS with constraints, nonsmooth, and intertwined continuous and discrete dynamics. Unlike current approaches, which separate the task associated with planning the motion from the design of the algorithm used for control, the algorithms to emerge from this project self-learn and self-adapt in real time to cope with unexpected changes in motion and specification constraints so as to enable autonomous systems to perform robustly and safely, and degrade gracefully under failure conditions. Specifically, the new algorithms will learn and monitor the physical and design constraints in real time, and adapt both planner and controller by selecting the appropriate constraints to enforce, with robustness and safety guarantees. The capabilities of the new tools will be demonstrated on multi-legged robots in harsh environments that make them prone to failures, and on aerial vehicles in contested/adversarial environments.
The proposed plan contributes to Science of Cyber-Physical Systems by addressing modeling, motion planning, and design of CPS with constraints, nonsmooth, and intertwined continuous and discrete dynamics. The merits of the proposal fall into four broad categories: (i) a framework to mathematically formulate learning-based planning and control for CPS with awareness of its constraints, (ii) novel architectures that lead to robust adaptive constraint satisfaction, (iii) deep understanding of roles and priorities of system constraints in CPS, and (iv) tools and design techniques that permit engineers to deploy constraint aware algorithms. The results of this work are broad in their application to all kinds of CPS that require planning and control, in particular, autonomous systems in transportation (air and ground). Synergistic collaborations with researchers at Samsung, the start-up Ghost Robotics, and at the University of Bologna are instrumental in disseminating the application of our results to industry and academia. A synergistic outreach program at UCSC and the University of Michigan impacts high school students and teachers.
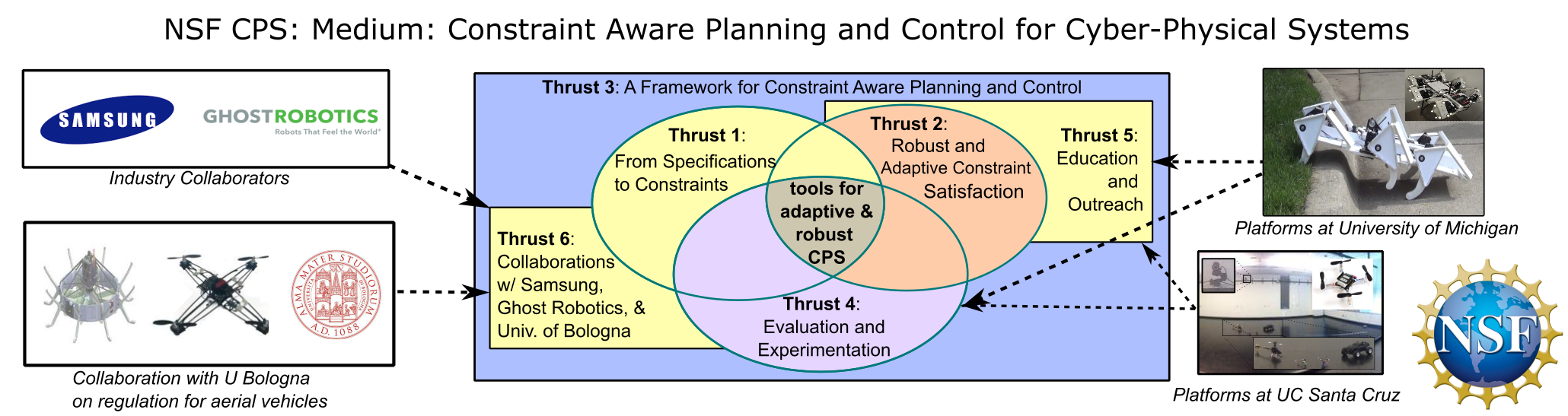
Funded by NSF under Grant no. CNS-2039054. Lead PI: R. G. Sanfelice. Co-PI: S. Revzen (UMich)
UCSC/OR: Seed Funding for Intelligent Transportation
Sponsored by the Office of Research at the University of California, Santa Cruz and the Baskin School of Engineering, we have established a program to carry out fundamental science for cyber-physical systems that enables accurate, safe, and high-performance control of intelligent transportation systems. The effort has tremendous translational potential and brings together a number of interested parties in the Santa Cruz/Monterey Bay area.
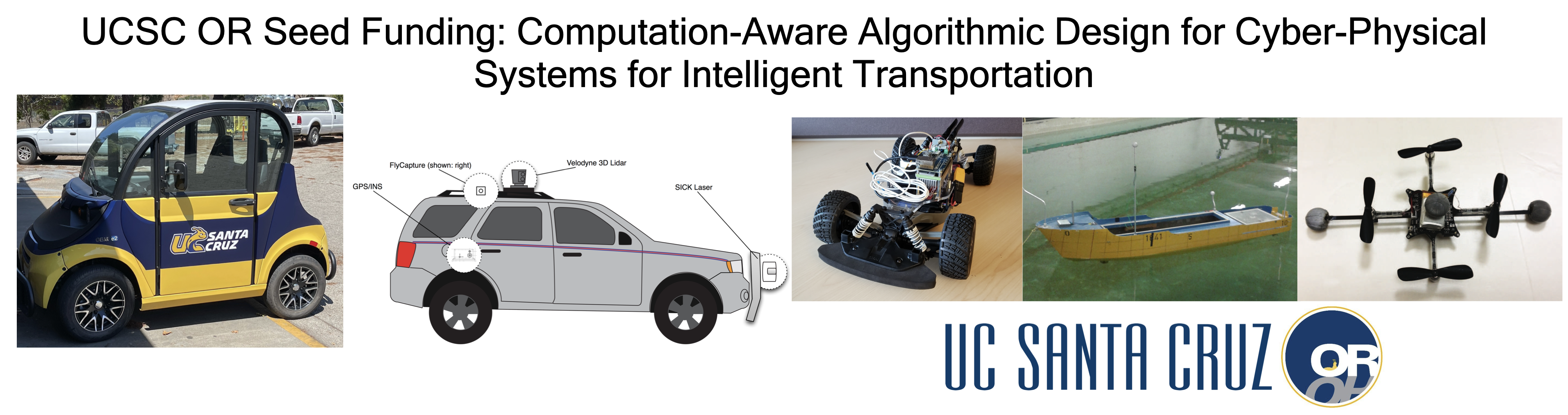
Funded by Office of Research and Baskin School of Engineering at the University of California Santa Cruz. Lead PI: Ricardo Sanfelice (UC Santa Cruz). Co-PIs: Abhishek Halder and Heiner Litz (UC Santa Cruz)
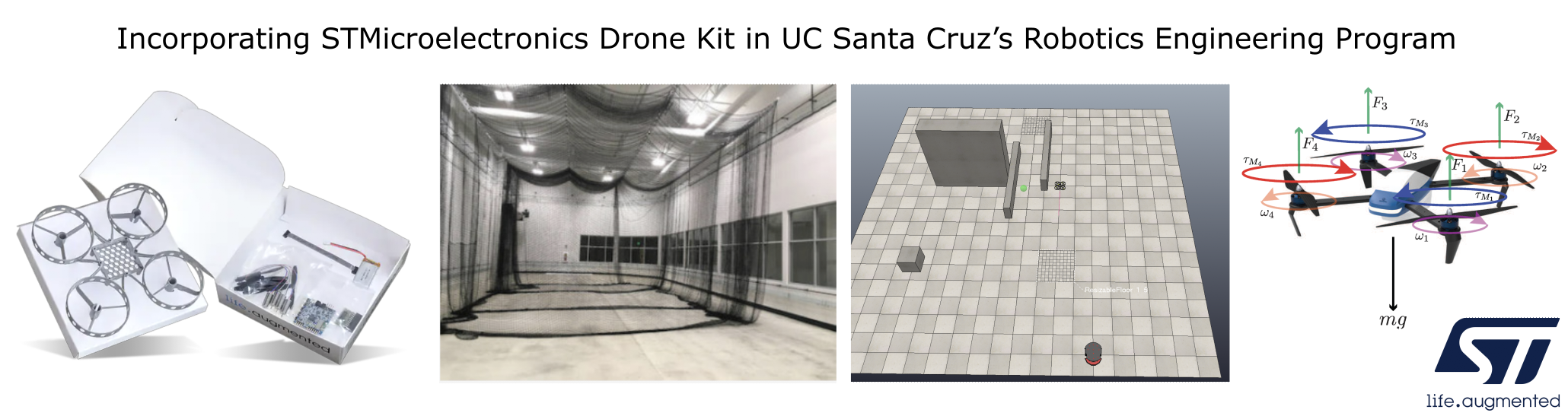
STMicroelectronics: Incorporating STMicroelectronics Drone Kit in UC Santa Cruz’s Robotics Engineering Program
Developing high-quality drone technology is essential for the emerging global market, as drones are able to perform increasingly complex tasks with limited human intervention. Businesses and defense organizations are increasing their investments in drone research to aid in military emergency response, disaster relief, and damage assessment during wildfires, hurricanes, and earthquakes. Utilizing innovative engineering technology to design high quality, autonomous drones is our goal.
As building drones helps students develop valuable skills in robotics and hardware design, we propose a project to incorporate STMicroelectronics drone kit STEVAL-DRONE01 in our educational program. The goal of the project is to design a curriculum to enrich our Robotics Engineering, specifically, our course ECE8: Robot Automation: Intelligence, through Feedback Control through the use of STMicroelectronics drone kits. To this end, we developed a series of six ECE8 labs, which are detailed below, that to fit teaching modality during the pandemic, can be carried out remotely. The labs developed incoroporating STMicroelectronics drone kit are available at the following website:
https://hybrid.soe.ucsc.edu/incorporating-stdrone-in-robotics-education
Funded by STMicroelectronics. PI: Ricardo Sanfelice (UC Santa Cruz).
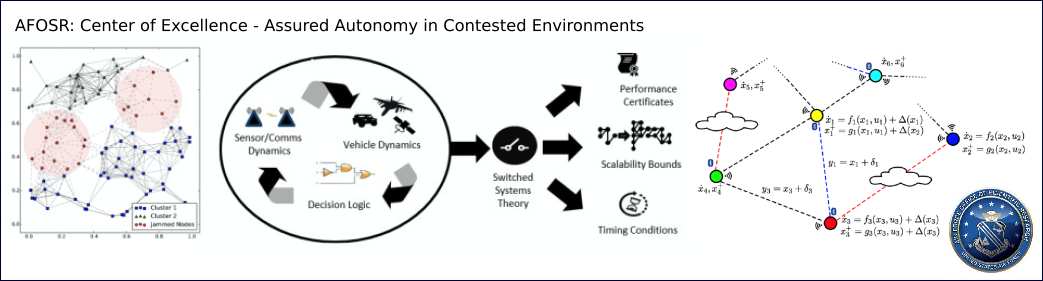
AFOSR: Center of Excellence - Assured Autonomy in Contested Environments
The AFOSR Center of Excellence "Assured Autonomy in Contested Environments" pioneers the development of fundamental theories and methods to enable assured autonomous mission execution in complex, uncertain, and adversarial conditions. Assured autonomous operations by a network of agents in contested environments require an integrated focus on the complex union of both physical and information dynamics within the analysis, design, and synthesis of logical decision making and control design. Efforts focus on the availability, integrity, and effective use of information by leveraging our team’s diverse toolsets in dynamics, mathematics, control theory, information theory, communications, and computer science. Networks of autonomous systems require information exchanges of many data types, including high-level mission specifications and sensor feedback for navigation and control. The goal of assuring autonomy is complicated by the interplay between dynamics of autonomous agents and the stochastic and intermittent dynamics of network traffic. This challenge is further amplified by delays and asynchrony in information flows. Information perturbations can also emanate from adversarial actors in unique and complex ways, requiring security-aware design and analysis methods. These challenges must be addressed considering resource limitations and quantitative tradeoffs.
Funded by AFOSR under Grant no. FA9550-19-1-0169. Lead PI: W. Dixon (U. of Florida), Co-PIs: R. Sanfelice (UC Santa Cruz), N. Fitz-Coy, M. Hale, R. Bevilaqua, K. Butler, J. Shea (U. of Florida), U. Topcu (U. of Texas-Austin), M. Pajic & M. Zavlanos (Duke University).
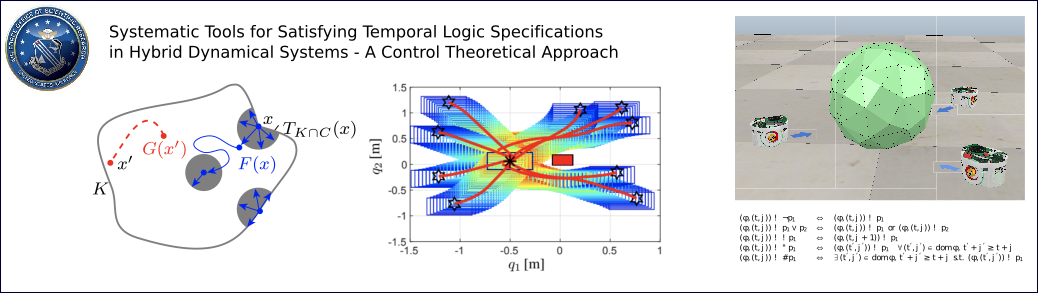
AFOSR: Systematic Tools for Satisfying Temporal Logic Specifications in Hybrid Dynamical Systems - A Control Theoretical Approach
The goal of this project is to develop tools that permit high-level specifications for solutions to hybrid dynamical systems that neither require discretization of the dynamics or of the state space, nor the computation of the solutions themselves. Our research is motivated by the fact that Air Force combat systems require autonomous systems that are agile, reliable, and resilient to meet stringent requirements of its missions. Unfortunately, the unavoidable combination of the physics, the networks, and the algorithms in such systems leads to hybrid system models, which makes the systematic design of algorithms very challenging. The unavoidable presence of obstacles, adversarial elements, and uncertainties in the environment further adds to the complexity and requires design tools that neither discretize the state or the dynamics while guaranteeing given high-level specifications, robustly. While discretization may aid computations in some cases, discretization of the hybrid system models emerging in Air Force missions may not permit assurance that the desired specifications are actually satisfied. To address these challenges, we propose to use control theoretical tools for the satisfaction of temporal logic formulas, in particular, tools to guarantee invariance, finite-time convergence, and robustness in hybrid systems.
Funded by AFOSR under Grant no. FA9550-19-1-0053. PI: Ricardo Sanfelice (UC Santa Cruz)
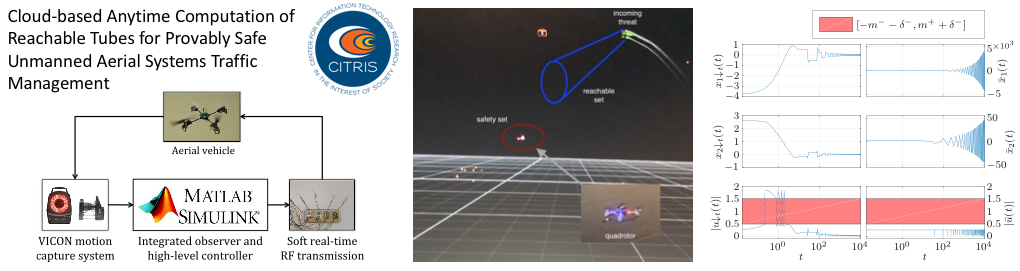
CITRIS: Cloud-based Anytime Computation of Reachable Tubes for Provably Safe Unmanned Aerial Systems Traffic Management
This research project aims to develop a framework and associated tools for fast computation of the space-time reachable sets for multiple networked agents under uncertainty, where agents could be a mix between autonomous robots, semi-autonomous robots, and human-operated systems. The primary application focus is to guarantee provably safe operation of unmanned aerial systems traffic management (UTM) enabling drones from different enterprises to share the national airspace in real-time, but the methodologies being developed will impact other safety-critical applications, such as self-driving cars, smart grids, and military systems. The goal of this project is to enable real-time computation of the reachable tubes for autonomous, semi-autonomous and remotely human-piloted aerial vehicles in UTM by harnessing two modern developments in computing architecture and algorithms: cloud-based parallel computation, and anytime computation.
Funded by CITRIS. PIs: Abhishek Halder (UC Santa Cruz), Mark Mueller (UC Berkeley), Ricardo Sanfelice (UC Santa Cruz), and Claire Tomlin (UC Berkeley)
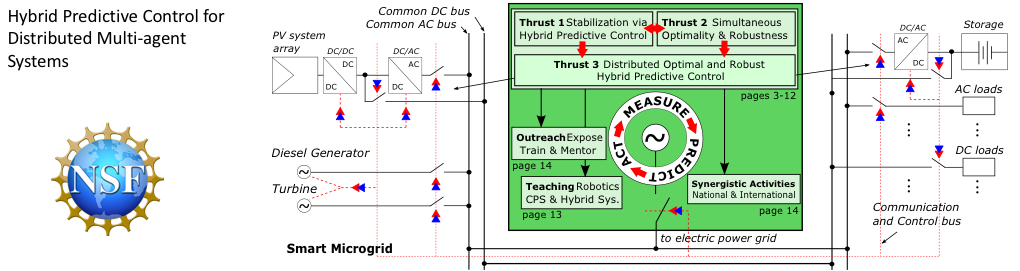
NSF: Hybrid Predictive Control for Distributed Multi-agent Systems
This proposal presents a research plan to advance the knowledge on the systematic design of algorithms that use prediction and optimization to make distributed decisions in multi-agent systems. Due to the combination of different types of dynamics (continuous and discrete) emerging from the physics laws governing the behavior of the systems, the networks that link them, and their on-board computing systems, the multi-agent systems are modeled as hybrid dynamical systems. The combination of such mixed behavior, both in the system to control and in the algorithms, is embodied in key future networks of multi-agent systems. The future smart grid will have variables that change continuously according to electric circuit laws, exhibit jumps due to controlled switches, failures, and modeling approximations, while the control algorithms require logic to adapt to such abrupt changes. Hybrid behavior will also emerge in other networked multi-agent systems, such as self-driving cars and groups of autonomous aerial vehicles, in particular, due to communication events, abrupt changes in connectivity, and the cyber-physical interaction between agents/robots, their environment, and communication networks. The results from this project will enable the development of such networked multi-agent systems with simultaneous robustness and optimality.
Funded by NSF under Grant no. ECS-1710621. PI: R. G. Sanfelice.
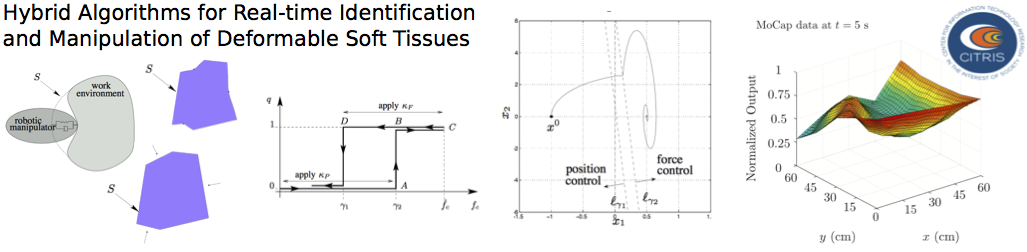
CITRIS: Hybrid Algorithms for Real-time Identification and Manipulation of Deformable Soft Tissues
In this project, building from distributed algorithms for estimation of soft tissues dynamics using differential neural networks (DNN) and the hybrid control strategies, we propose to develop hybrid algorithms for manipulation and grasping tasks involving multiple contacts with soft tissues whose characteristics and dynamical properties need to be identified in real time. The aim of the algorithms to generate in this project is to automatically control the shape of a soft object, whose deformations would lead into active changes in the manipulator’s motion. To date, there are no algorithms that reliably accomplish such a task, and the proposed unique combination of DNN with hybrid control will be instrumental to obtain reliable results. The algorithms resulting from this project will impact to robotic systems for medicine, in particular, robotic surgery, and other applications that impact global economy, such as the active shaping of food materials, handling and folding fabrics, assembling flexible automotive parts, manipulation of cables or sutures, as well as palpating organs and tissues.
Funded by the Center for Information Technology Research in the Interest of Society (CITRIS). PIs: R. Q. Fuentes Aguilar (ITESM) and R. G. Sanfelice (UCSC)
AFRL: Game-theoretical Tools for the Design of Decentralized Control Algorithms for Hybrid Systems with Uncertainty
This proposal aims to generate new tools for the design of decentralized algorithms that make control decisions in a decentralized and robust manner using hybrid control and game theory tools. Game theoretical tools for the solution of differential games allow us to formulate and solve problems that capture individual and collective payoffs as well as the capabilities and effect of each of the agents (or players) participating in the game. On the other hand, hybrid systems theory allow for the modeling and analysis of dynamical systems with intertwined continuous and discrete dynamics. The goal of this project is to formulate hybrid dynamical games that permit modeling, analysis, and design of algorithms for multiple agents with hybrid dynamics.
Funded by Air Force Research Laboratory (AFRL). PI: R. G. Sanfelice
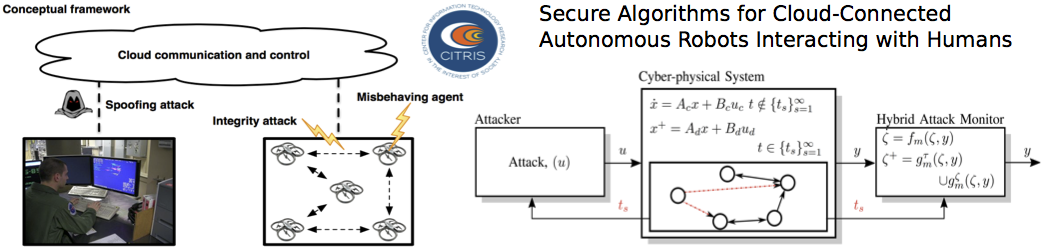
This project addresses security and reliability issues for cloud-connected systems comprising autonomous robots and humans. The scenario is considered where autonomous robots cooperatively perform a complex task, such as search and rescue, intruder detection and tracking, and climate mapping. Robots are connected to the cloud, through which they also receive sporadic and high-level feedback from human operators. Synergy of human cognition and robot capabilities has the potential to enable the completion of tasks that could not be performed by humans and robots alone, provided that appropriate mechanisms are in place to ensure trustworthy cooperation among different parts, and reliable autonomous operation in the face of failures and malicious tampering. This project will undertake the first major steps along this direction by (i) deriving dynamical models of cloud-connected autonomous systems and their vulnerabilities, (ii) designing new tools to ensure security and reliable operation in the face of different attacks, and (iii) demonstrating the effectiveness of the proposed methods to work in practice through simulations and experiments.
Funded by the Center for Information Technology Research in the Interest of Society (CITRIS). PI: F. Pasqualetti (UCR), co-PI: R. G. Sanfelice (UCSC)
CROSS: Strong Consistency in Dynamic Wireless Networks to Enable Safe and Efficient Navigation of Autonomous Vehicles
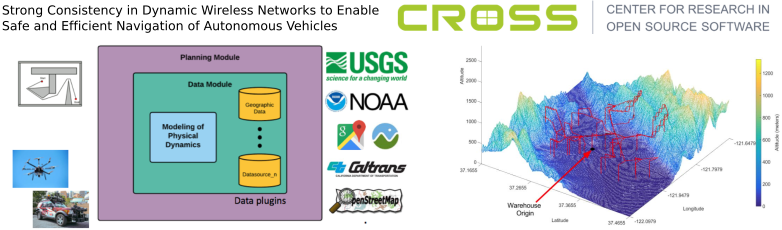 The objectives of this project are to determine consistency requirements of distributed systems with smart storage devices over realistic networks and design algorithms that assure needed consistency, and to develop an open source software to implement the algorithms in the context of safe operation of autonomous vehicles to provide consistent data. Additionally, an open source hybrid dynamics simulation engine capable of simulating large scale environments with multi-agent systems will be developed. It is believed that future services like unmanned-traffic management will depend upon strong consistency for safe operation. These services will often need to be provided over lossy wireless networks with limited bandwidth, where partitions may be frequent. We propose to study the consistency requirements of distributed systems with smart storage devices over realistic networks. In particular, the distributed systems will implement algorithms that require large amounts of (dynamically changing) data that is available to all systems via a shared log. The problem of navigation of autonomous systems will serve as the prototype application of this research.
The objectives of this project are to determine consistency requirements of distributed systems with smart storage devices over realistic networks and design algorithms that assure needed consistency, and to develop an open source software to implement the algorithms in the context of safe operation of autonomous vehicles to provide consistent data. Additionally, an open source hybrid dynamics simulation engine capable of simulating large scale environments with multi-agent systems will be developed. It is believed that future services like unmanned-traffic management will depend upon strong consistency for safe operation. These services will often need to be provided over lossy wireless networks with limited bandwidth, where partitions may be frequent. We propose to study the consistency requirements of distributed systems with smart storage devices over realistic networks. In particular, the distributed systems will implement algorithms that require large amounts of (dynamically changing) data that is available to all systems via a shared log. The problem of navigation of autonomous systems will serve as the prototype application of this research.
Funded by the Center for Research in Open Source Software (CROSS). PI: R. G. Sanfelice
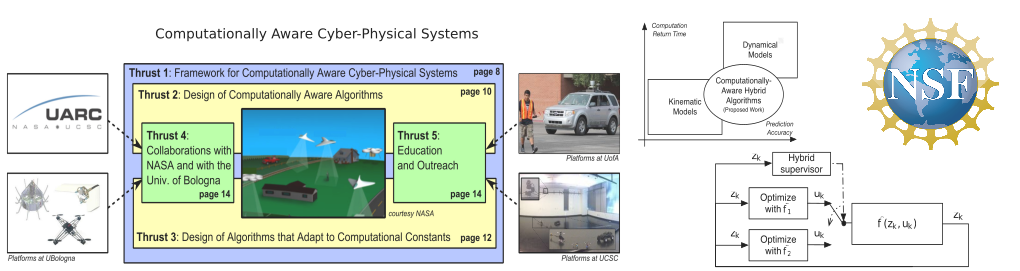
NSF CPS: Synergy: Collaborative Research: Computationally Aware Cyber-Physical Systems
The objective of this work is to generate new fundamental science for cyber-physical systems (CPSs) that enables more accurate and faster trajectory synthesis for controllers with nonlinear plants, or nonlinear constraints that encode obstacles. The approach is to utilize hybrid control to switch between models whose accuracy is normalized by their computational burden. This synergistic approach is why we deem our proposed work will enable Computationally Aware Cyber-Physical Systems. The results from this project will advance the knowledge on modeling, analysis, and design of CPSs that utilize predictive methods for trajectory synthesis under constraints. Current algorithm designs seldom include the computational limitations of the hardware/software on which they are implemented as explicit constraints; thus, a challenge is to correctly approximate (or account for) how these constraints can be overcome for real-time systems. The results will include methods for the design of algorithms that adapt to the computational limitations of autonomous and semi-autonomous systems that must satisfy stringent timing and safety requirements. For this purpose, we propose tools capable of accounting for computational capabilities in real-time, and hybrid feedback algorithms that include prediction schemes exploiting computational capabilities to arrive at more accurate predictions, within the time constraints. The problem space will draw from models of Unmanned Air Systems (UAS) in the National Air Space (NAS); algorithms will be modeled in terms of hybrid dynamical systems, to guarantee dynamical properties of interest.
Funded by National Science Foundation under Grant no. CNS-1544396. PIs: R. G. Sanfelice and J. M. Sprinkle.
AFOSR: Reconfigurable Algorithms for High Performance and Robust Autonomy in Complex Networks
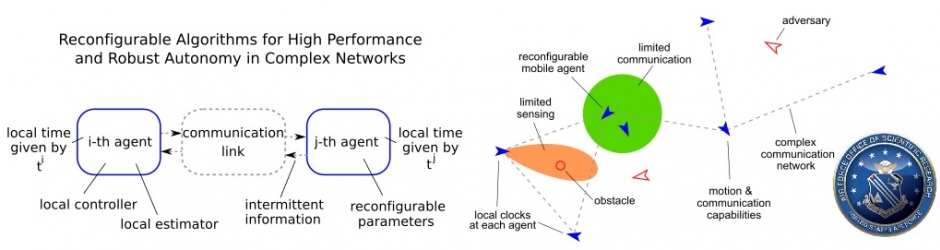
This project aims to generate new tools for the design of decentralized observers and controllers that not only confer high performance and robustness, but also efficiently handle the presence of continuous and discrete behavior in complex networks. The methods to emerge from the proposed research target communication and control scenarios for Air Force systems in which digital networks define the links between the agents, information is limited, adversarial behavior is at its utmost, and uncertainty is predominant. The algorithms to be developed with the new methods will combine hybrid estimation strategies to identify the behavior of the adversaries with hybrid control strategies for synchronization of multi-agent systems so as to reconfigure and control the agents. The fundamental research in this proposal pertains to the design of hybrid state observers and synchronization algorithms for hybrid systems, which are wide open areas of research. The outcomes of this research effort will permit Air Force’s autonomous systems to satisfy the stringent requirements imposed by its missions, in particular, the accomplishment of a common goal by relying only on noisy and intermittent measurements transmitted over heterogeneous networks.
Funded by Air Force Office of Scientific Research under Grant no. FA9550-16-1-0015. PI: R. G. Sanfelice.
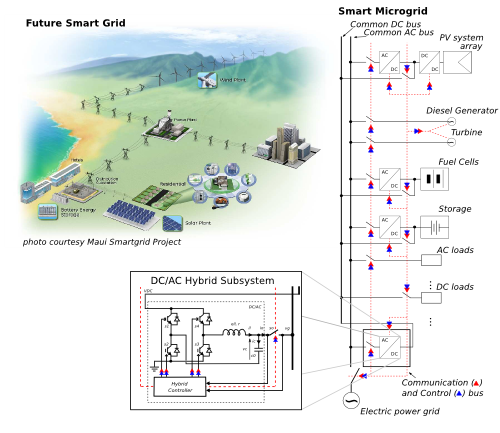
NSF CAREER: Enabling Design of Future Smart Grids via Input/Output Hybrid Systems Tools
The increasing necessity of producing more energy, combined with the surging interest in green technologies worldwide, have promoted the need for a highly reliable, cost-efficient, and self-sustained electric power grid. Future energy distribution systems ought to be capable of interconnecting diverse power sources, including fossil and nuclear-fueled generators; renewable sources, such as hydropower generators, photovoltaic arrays, and wind turbines; storage systems, such as fuel cells, compressed-air devices, and flywheels; and power quality improvement units. The purpose of this project is to enable the design of such future smart grid systems using hybrid systems theory. Hybrid systems are dynamical systems with intertwined continuous and discrete behavior. Such a mixed behavior is embodied in models of smart microgrids and their interconnections due to continuous changes as well as jumps in currents and voltages, i.e., mainly due to controlled switches, failures, and modeling approximations. The approach taken in this project is to interpret smart grid systems as the interconnection of hybrid systems with inputs and outputs to facilitate partitioning of the entire system into small, tractable components suitable for modular analysis and design. Such a “divide and conquer” approach relies upon the existence of a theory of interconnections of systems and on constructive control design tools that guarantee robustness and optimality. The goals of this project aim at generating these much needed control and optimization theoretical tools for input/output hybrid system models emerging in smart grids. These new tools will enable modular design of components that operate robustly and optimally when interconnected in real-world smart grids, such as the smart microgrid testbed at Sandia National Laboratories, in which results from this project will be tested. The proposed research plan is deeply integrated with teaching and training activities that will significantly impact middle and high school education levels by training instructors and students on control engineering and applications to smart grids.
Funded by National Science Foundation under CAREER Grant no. ECS-1150306. PI: R. G. Sanfelice.
AFOSR YIP: Robust Feedback Control of Reconfigurable Multi-agent Systems in Uncertain Adversarial Environments
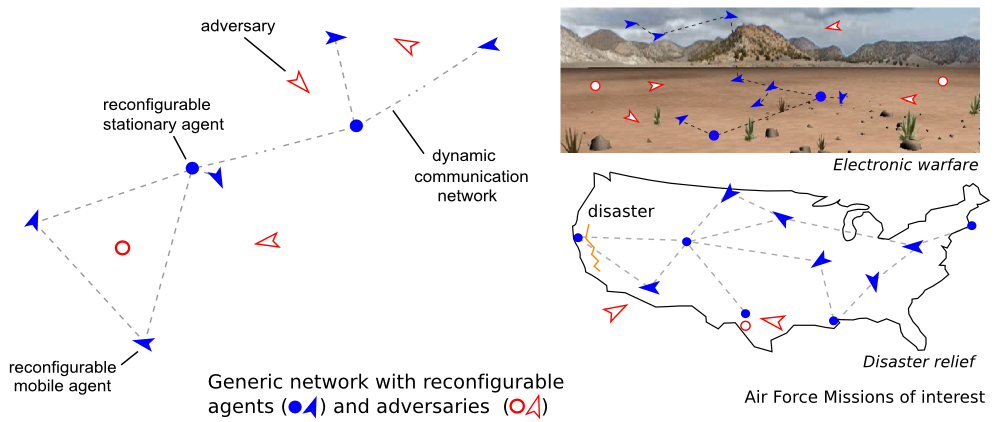
To fulfill the stringent requirements of its missions, Air Force combat systems require autonomous systems that are agile, reliable, and resilient. Emerging technologies permitting cooperation of multiple autonomous systems are suitable for the accomplishment of Air Force missions since, rather than relying on a single agent, they leverage task assignment complexity and redundancy by coordinating multiple systems. However, the presence of adversarial elements and uncertainty in the environment impose significant challenges to the design of such systems. In particular, they impose stringent requirements on the coordination and communication algorithms used for the control of multi-agent systems. This project advocates that such requirements can be met by nonlinear state observers and hybrid controllers for multi-agent systems that explicitly take into account the potential presence of adversaries and uncertainty in the environment. To this effect, a control theoretical approach and the combination of state observers and hybrid control tools are pursued for the design of decentralized and robust algorithms for multi-agent systems. The main purpose of using decentralized estimation algorithms is to leverage the presence of multiple agents in the environment to substantially improve the estimation of the adversaries' state by averaging and sharing information. To this effect, design tools for multiple state observers with adaptation to perturbations will be generated. The main purpose of using hybrid control algorithms is due to their suitability in the execution of decision-making strategies for rapid reconfiguration of the agents and stabilization of complex dynamics. The methods to emerge from the results of project target the following communication and control missions for Air Force systems in which adversarial behavior is at its utmost, information is limited, and uncertainty is predominant: beyond line-of-sight (BLOS) communication and control, electronic warfare (EW) in the battlefield, and emergency management in disaster response.
Funded by Air Force Office of Scientific Research under Grant no. FA9550-12-1-0366, Young Investigator Program. PI: R. G. Sanfelice.
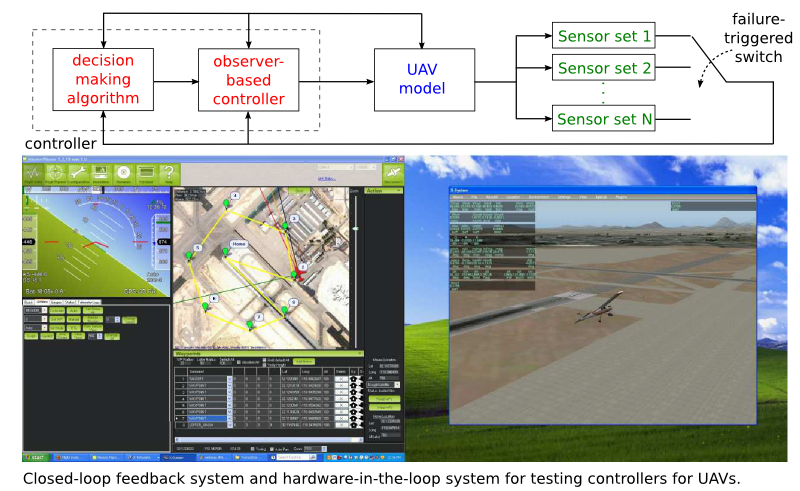
Honeywell: Robust Decision-making Control for Autonomous Recovery of Aerospace Vehicles under Sensor Limitations and Failures
Budget constraints limit the number of sensors that can be integrated in the avionics of Unmanned Aerial Vehicles (UAVs). Sensor failures can prevent avionics from autonomously controlling a UAV and hence, may lead to unstability. Such budget constraints and unexpected failures can be addressed by adaptive/self-configuring avionics for UAVs. The development of such avionic systems require advanced control algorithms executing decision-making strategies designed to cope with a limitation in the number of sensors as well as with abrupt changes of sensor data. In this project, we propose to design algorithms that estimate the state of the system with limited number of measured quantities, perhaps due to cost limitations or failures, and use those estimates to select the appropriate controller to apply to the vehicle. The understanding of the minimum number of sensors needed in control of UAVs and the margins of robustness to sensor failures will provide key insight for the development of fault tolerant, cost-efficient UAVs.
Funded by Honeywell. PI: R. G. Sanfelice.
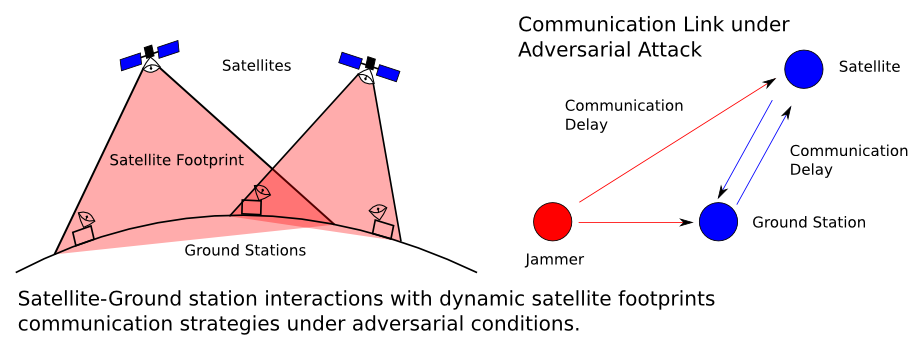
AFRL/AFOSR STTR: Interference and Jamming Mitigation in Satellite Communications Using Spectrum Sensing and Dynamic Frequency Hopping
Due to their capabilities to reconfigure and adapt to changing environments, spectrum-agile software-defined radios (a.k.a. cognitive radios or CRs) are ubiquitous in a variety of military and commercial applications. These systems provide a much needed solution for improving the spectral efficiency of under-utilized portions of the licensed spectrum as well as to battle adversarial agents attempting to disrupt communication networks. In this project, we consider a novel application of the CR technology for secure satellite communications and apply hybrid control methods to achieve frequency rendezvous of the CRs and to optimize the signal to interference plus noise ratio (SINR) of the network in the presence of adversaries.
Funded by AFRL and by AFOSR's STTR Program. PI: M. Krunz, co-PI: R. G. Sanfelice.
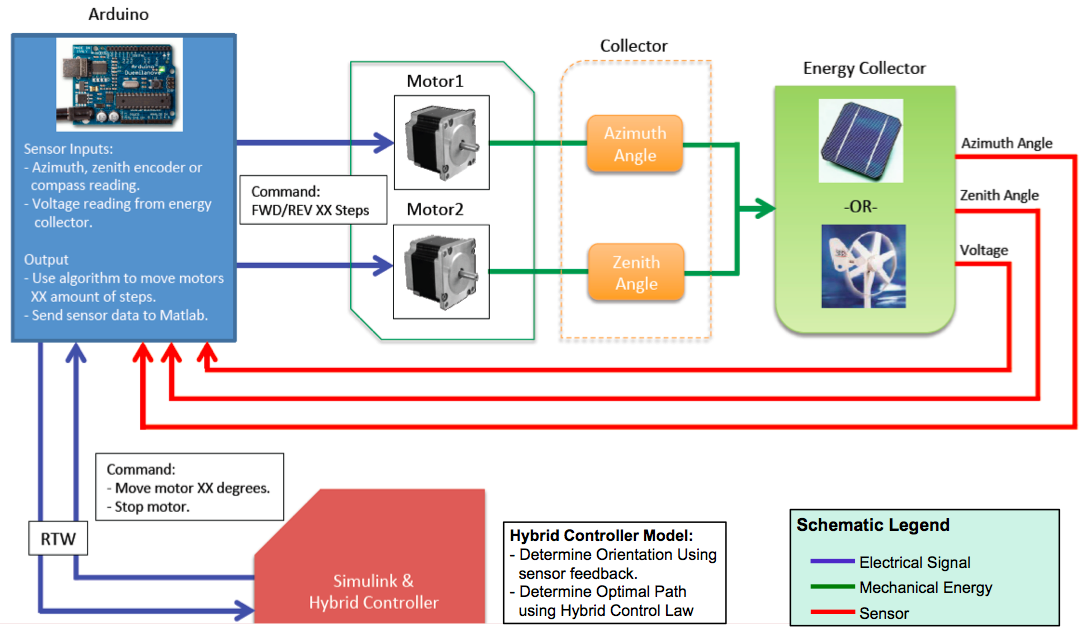
Mathworks: Attitude Control for Optimal Generation of Energy From Multiple Energy Sources
As renewable energy becomes more widely available, a need for autonomous and standalone systems in remote locations will increase. However, the margins for energy collection are still low; the most efficient solar cells only achieve 40% efficiency. To maximize energy collection, it is necessary to create smart controllers to achieve optimal energy collection and minimize operational power requirements. In this project, we propose to generate a prototype and associated algorithms for control education using Matlab/Simulink based on energy generation from solar and wind sources. It consists of a computer-controlled collector of solar and wind energy sources. The educational integration of this project will be in three control education courses in the Aerospace and Mechanical Engineering Department at the University of Arizona. The introduction of this real-life renewable energy challenge in these courses will provide a practical application to solve using classroom theory.
Pan/Tilt Motion Control System website:
https://hybrid.soe.ucsc.edu/mathworks-pan-tilt-device
The Pan/Tilt Motion Control System has already been used in projects within the following courses: AME427, AME455, and AME549.
Funded by Mathworks. PI: R. G. Sanfelice.